Great Workshop last weekend! Below you’ll find the patches we built …
If you want to review the very basics, please watch the first three of these video tutorials or read about them at flossmanuals.net.
1. GEM basics
download link
![Use [gemwin] and [gemhead] to display graphics](https://elabweissensee.wordpress.com/wp-content/uploads/2013/12/gemwin-gemhead.png?w=645)
use [gemwin] and [gemhead] to display graphics
2. Dealing with jittery (microphone) data + using the mouse input
download link

change the height of an rectangle by microphone input and the tranasparency by mouse movment
3. Change the backgound color of the GEM window
download link – save this patch in the same folder as the parent patch and call this abstraction by creating an object called random-gemwin-bg.

random gemwin background abstraction
4. The very useful map abstraction
download link – save this patch in the same folder as the parent patch and call this abstraction by creating an object called map-values.

remember the very useful map abstraction
4. Using the webcam
download link – see the [pix_video] helpfile for more information

display webcam feed in a gem window + rizise the image keeping the aspect ratio
5. Read an anlalog sensor connected to an Arduino (Firmata)
download link – the PD patch
download link – the Arduino Environment
To use this patch, you will need to have an Arduino board with the Standart Firmata firmware installed:
- Download and install and open the Arduino environmet
- Connect the Arduino board
- Select your type of Arduino: tools > board
- Select your serial port: tools > serial port > dev/tty/usb… or COM
- Open the Standart Firmata sketch: file > examples > Firmata > StandartFirmata
- Upload StandartFirmata to your Arduino
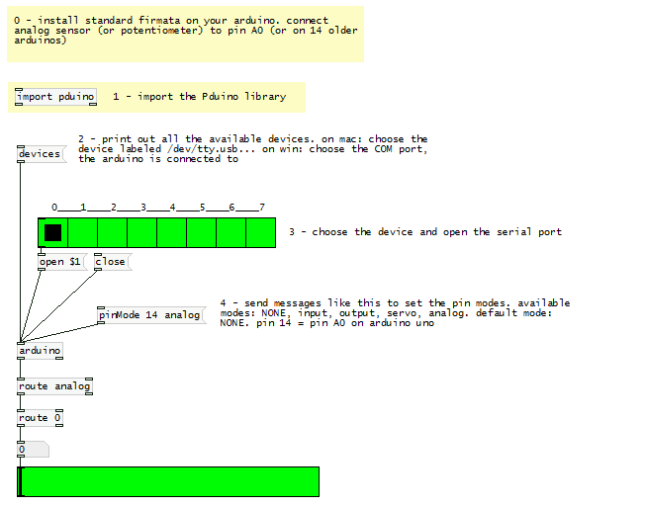
arduino + standart firmata + pd: reeds analog sensor
6. Control servo
download link – the PD patch
download link – the Arduino Environment
To use this patch, you will need to have an Arduino board with the Standart Firmata firmware installed:
- Download and install and open the Arduino Environmet
- Connect the Arduino board
- Select your type of Arduino: tools > board
- Select your serial port: tools > serial port > dev/tty/usb… or COM
- Open the Standart Firmata sketch: file > examples > Firmata > StandartFirmata
- Upload StandartFirmata to your Arduino

arduino + standart firmata + pd: servo
7. Read messages send by an OSC app
download link – PD patch
Play Store/App Store – touchOSC is used in the example below
To use the example below, set the outgoing port of the touchOSC app to 8000. The [route] objects are set for messages sent by touchOSC.

read osc messages with pure data
8. Send your phones accelerometer values to Pure Data with OSC
download link – PD patch
Play Store/App Store – touchOSC is used in the example below
To use the example below, set the outgoing port of the touchOSC app to 8000. The [route] objects are set for messages sent by touchOSC. The accelerometer values may be different for your phone. You may have to change the range of the sliders or do some additional math.

receive accelerometer data using OSC
![Use [gemwin] and [gemhead] to display graphics](https://elabweissensee.wordpress.com/wp-content/uploads/2013/12/gemwin-gemhead.png)










